A friend of mine helped plan and launch a payload about a month back. I was saddened to learn they had not recovered the payload yet. They are hopeful that as the soybean and corn fields of Ohio enter the harvest season, or as the leaves follow their autumnal cycle, the payload will reveal itself. I wanted to help so I offered to review their data.
As with my flights and perhaps some of your flights, I think there are humbling moments that guide us towards better experiences. Upon one of my successful recoveries, I noted the antenna cable nearly twisted itself off. On another, a lift calculation error made for a slow ascent and a long, long day. Like I said, humbling moments that helped me design better payloads and fly better flights.
For their flight, they decided to use the Spot Tracker as the primary means of following the payload. I’m a fan of Spot and have seen it reliably used as a back-up, and used to locate a payload after APRS packets stop arriving. However, in this case, the Spot separated from the payload mid-flight and was recovered from a corn field a few days later. The payload was not found.
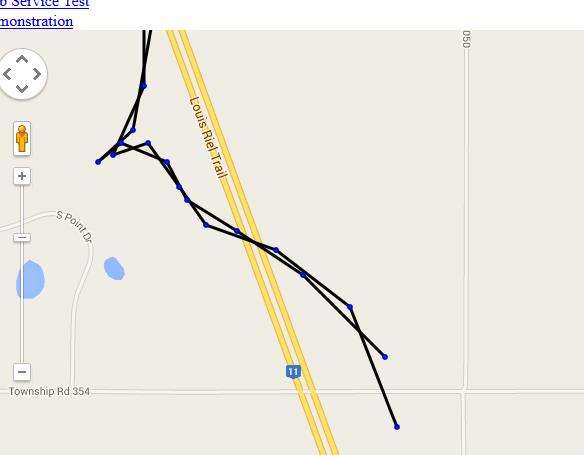
Their Spot logged 21 data points and the first six or seven were pre-flight (that is, on the ground). They also had the KML from the flight path prediction. I was able to piece together a likely flight path using the Spot data and prediction data. However, the resulting landing area was still tens of square miles. I could game the flight path by changing ascent rate, descent rate, or maximum altitude but gaming would not make up for a lack of key data.
Ascent Rate
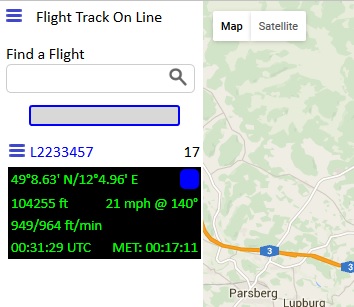
The ascent rate would have helped to determine the altitude of the last Spot data point (the Spot does not provide altitude so I had to guess). I’ve followed many flights (I enjoy following flights and they are great tests for my MapPoint Add-In and Flight Track On Line) and guessed a rate between 750 and 1150 ft/min. I could employ the gas laws to make a better guess but did not have the volume of helium they used. In addition to altitude, ascent rate has some impact on the final landing site. In this case, a higher ascent rate moves the landing site north.
Descent Rate
The descent rate would have helped create a better flight path during payload descent. In this case, a longer descent placed the landing site farther south. However, it works better when the maximum altitude is known.
Maximum Altitude
The predicted flight path had a westward course above 65,000 ft. The payload would travel west until burst. The amount of travel impacts the landing site bringing it westward almost proportionally.
I was drawn into this hobby because of the engineering challenge. It also allows me to explore software development and testing in ways usually not possible in a large IT department. In turn, I believe it has helped improve how I develop and certainly how I test software. Every flight becomes a story, and stories help make GPSL enjoyable as well as educational.
If they find the payload, I’ll return to this post. Using just 14 data points during ascent with key pieces of information to predict a landing site may qualify for some sort of record. Amusing but I didn’t do it for a record. I’m happy to add an opinion that may assist in locating a lost payload. I’m most interested in the story from the payload itself. What will it provide that will make the next flight better?
Lastly, there are lessons above (no pun intended). It is not for me to point out right or wrong since I continue to be a student in the adventure of flying self-built or team-built payloads on the end of a balloon to the edge of space.
What was your best lesson?